Nauwkeurigheid | Wat is het verschil tussen RTK, FIX en RTK Float?
Dit artikel geeft een breder inzicht in RTK, FIX en RTK Float. Real-time Kinematic (RTK) wordt gebruikt in digitale landmeetkunde als aanvulling op GNSS.
Wist je dat iedereen kan inmeten en uitzetten met GPS?
Lees meer over de UNI-GRx, een universele RTK GNSS ontvanger. Digitaal meten en uitzetten is nu eenvoudiger dan ooit. Verkrijgbaar in een compleet pakket en wereldwijd klaar voor gebruik. Meer weten? Klik op hier
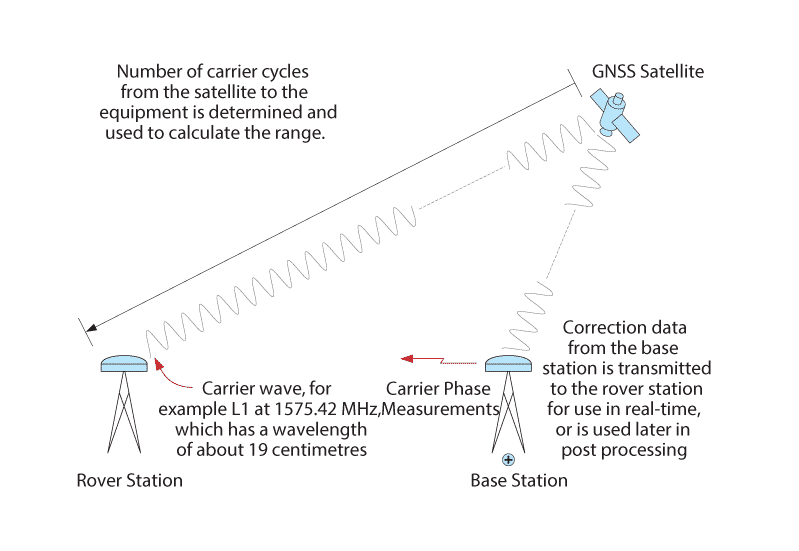
RTK (Real-time Kinematics) is gebaseerd op het gebruik van referentiestations en is een verzamelmethode die wordt gebruikt voor landmetingen op basis van GNSS. De GNSS-ontvanger ontvangt plaatsbepalingssignalen van satellieten en ontvangt RTK-correctiegegevens via radio of internet. Beide signalen, GNSS en correcties, worden toegevoegd aan een algoritme dat vervolgens een positioneringsoplossing berekent.
Afhankelijk van het aantal satellieten dat zichtbaar is in de lucht, kunt u een "zwevende" of "vaste" positioneringsoplossing verkrijgen met verschillende nauwkeurigheidsniveaus, zoals u kunt zien op het dashboard in UNI-Connect. Als er voldoende satellieten zichtbaar zijn op uw dashboard in UNI-Connect, kan het een FIX-positieoplossing bieden met een centimeter nauwkeurigheid. Als er niet genoeg satellieten zichtbaar zijn, kan UNI-GRx alleen een Float-oplossing bieden met de beste nauwkeurigheid op dat moment, die niet centimeter-nauwkeurig is. Er wordt met veel factoren rekening gehouden om een "voldoende" aantal satellieten te bepalen. Je kunt zeggen dat een minimum van 12 satellietsignalen gelijk verdeeld over de hemel en een maximale basisafstand van 15 km je een snelle en stabiele fix zal geven.
Fixed RTK
Kort gezegd betekent een FIX-oplossing dat de UNI-GRx-ontvanger een correcte oplossing heeft berekend. Het heeft bepaald dat de coördinaten die je ziet, een bepaalde nauwkeurigheid hebben met overeenkomstige verdunning. Je kunt onder normale omstandigheden meten met een nauwkeurigheid tussen 1 en 3 centimeter.
RTK gebruikt ingewikkelde wiskundige formules en algoritmen, waaronder berekeningen van het exacte aantal radiogolflengtes tussen de satellieten en het referentiestation, om een FIX-oplossing te verkrijgen. Meer details over deze grondbeginselen kun je lezen op de Navipedia pagina's van de European Space Association (ESA).
Hoe krijg ik een fixed oplossing?
- Plaats de UNI-GRx bij goed zicht op de hemel.
- Zorg ervoor dat de UNI-GRx een stabiele en snelle (internet) verbinding heeft met de leverancier van RTK-correcties.
- Zorg ervoor dat de UNI-GRx niet wordt gehinderd door gebouwen of bomen.
Als je moet meten in gebieden met een minder helder zicht op de hemel en/of die worden belemmerd door bomen of gebouwen, breng de UNI-GRx dan eerst naar een meer open plek totdat een FIX-oplossing is verkregen. Loop dan langzaam naar het gebied waar u wilt werken, dit helpt het algoritme om een stabiele FIX-oplossing te behouden.
Vlotter RTK
Bij een Float-oplossing is het algoritme (nog) niet opgelost en kan het (nog) geen acceptabele FIX-oplossing opleveren. Omdat er geen FIX-oplossing is, wordt er een Float-oplossing gegeven, die altijd een minder nauwkeurige positie is dan een fixed oplossing en in het algemeen niet gebruikt kan worden voor metingen op de centimeter nauwkeurig. We raden je aan te wachten of de bovenstaande tips te volgen om een FIX-oplossing te verkrijgen.
In het begin zal het algoritme altijd starten in een Float-status. Als je goede hemelomstandigheden hebt, hoef je alleen maar te wachten tot het algoritme is opgelost, wat meestal tussen de 30-90 seconden duurt. Als de UNI-GRx tijdens de metingen terugvalt naar de Float-status, geeft dit meestal aan dat de hemelomstandigheden moeilijker worden of gewoon veranderd zijn, omdat je een hoek om bent gelopen. Het beste is om naar een open gebied te gaan of de UNI-GRx voor een korte periode stabiel te houden op dezelfde plek, een FIX te verkrijgen en terug te keren naar de gewenste locatie of je pad te vervolgen.